
三相反應式步進電機工作原理
三相反應式步進電機工作原理,反應式步進電機原理由于反應式步進電機工作原理比較簡單。下面先敘述三相反應式步進電機原理。
1、 結構:
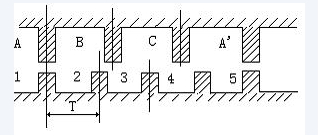
電機轉子均勻分布著很多小齒,定子齒有三個勵磁繞阻,其幾何軸線依次分別與轉子齒軸線錯開。0、1/3て、2/3て,(相鄰兩轉子齒軸線間的距離為齒距以て表示),即A與齒1相對齊,B與齒2向右錯開1/3て,C與齒3向右錯開2/3て,A'與齒5相對齊,(A'就是A,齒5就是齒1)下面是定轉子的展開圖:
2、 旋轉:
如A相通電,B,C相不通電時,由于磁場作用,齒1與A對齊,(轉子不受任何力以下均同)。 如B相通電,A,C相不通電時,齒2應與B對齊,此時轉子向右移過1/3て,此時齒3與C偏移為1/3て,齒4與A偏移(て-1/3て)=2/3て。如C相通電,A,B相不通電,齒3應與C對齊,此時轉子又向右移過1/3て,此時齒4與A偏移為1/3て對齊。 如A相通電,B,C相不通電,齒4與A對齊,轉子又向右移過1/3て這樣經過A、B、C、A分別通電狀態,齒4(即齒1前一齒)移到A相,電機轉子向右轉過一個齒距,如果不斷地按A,B,C,A……通電,電機就每步(每脈沖)1/3て,向右旋轉。如按A,C,B,A……通電,電機就反轉。 由此可見:電機的位置和速度由導電次數(脈沖數)和頻率成一一對應關系。而方向由導電順序決定。 不過,出于對力矩、平穩、噪音及減少角度等方面考慮。往往采用A-AB-B-BC-C-CA-A這種導電狀態,這樣將原來每步1/3て改變為1/6て。甚至于通過二相電流不同的組合,使其1/3て變為1/12て,1/24て,這就是電機細分驅動的基本理論依據。 不難推出:電機定子上有m相勵磁繞阻,其軸線分別與轉子齒軸線偏移1/m,2/m……(m-1)/m,1。并且導電按一定的相序電機就能正反轉被控制——這是步進電機旋轉的物理條件。只要符合這一條件我們理論上可以制造任何相的步進電機,出于成本等多方面考慮,市場上一般以二、三、四、五相為多。
3、 力矩:
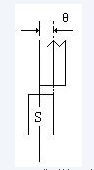
電機一旦通電,在定轉子間將產生磁場(磁通量Ф)當轉子與定子錯開一定角度產生力F與(dФ/dθ)成正比
其磁通量Ф=Br*S Br為磁密,S為導磁面積 F與L*D*Br成正比 L為鐵芯有效長度,D為轉子直徑 Br=N·I/RN·I為勵磁繞阻安匝數(電流乘匝數)R為磁阻。力矩=力*半徑力矩與電機有效體積*安匝數*磁密 成正比(只考慮線性狀態)因此,電機有效體積越大,勵磁安匝數越大,定轉子間氣隙越小,電機力矩越大,反之亦然。
同類文章排行
- 外轉子電機和內轉子電機的優缺點
- 步進電機接線圖圖解以及步進電機接線顏色的定義
- 42步進電機參數詳細
- 圖解步進電機基本結構和工作原理
- 如何實現步進電機正反轉方向調節?
- 步距角是什么?步距角是怎么算出來的?
- 伺服電機怎么接線圖
- 步進電機接線問題!三張接線圖立馬幫您解決
- 步進電機的用途及優勢特點
- 步進電機的靜力矩或者叫保持轉矩
最新資訊文章
- 57步進電機參數,57mm二相開環步進電機選型
- 步進電機帶剎車,抱閘步進電機的優勢特點
- 力矩的計算公式以及如何運算,精心整理值得收藏
- 1000線閉環步進電機和2500線閉環步進電機的區別和選型
- 工業級直流無刷電機的工作原理,整理于網絡僅供學習參考
- 三差分通道的42閉環步進電機,你了解多少?
- 了解步進電機工作原理,才能正確選擇步進電機
- 絲桿步進電機和步進電機的區別,主要在這兩點
- 步進電機和伺服電機的區別,各具特色,各領風騷
- 步進電機選型看這些,小白也能懂
- 關于二相步進電機,從5個方面給你講清楚
- ZPS115行星減速機
- ZSPLF90行星減速機
- ZSPLF60行星減速機選型
- 轉角輸出ZPS42行星減速機選型
- SPLF120行星減速機的選型
- SPLF90伺服行星減速機選型
- SPLF60伺服行星減速機的特點和選型介紹
- PS42行星減速機的特點和選型介紹
- 方形輸出的PLF60行星減速機

