
-

-
2019-02-21 什么是伺服?什么是伺服電機(jī)?
伺服電機(jī)驅(qū)動(dòng)器接收電機(jī)編碼器的反饋信號(hào),并和指令脈沖進(jìn)行比較,從而構(gòu)成了一個(gè)位置的半閉環(huán)控制。所以伺服電機(jī)不會(huì)出現(xiàn)丟步現(xiàn)象,每一個(gè)指令脈沖都可以得到可靠響應(yīng)。
-

-
2019-02-20 伺服電機(jī)伺服系統(tǒng)的市場剖析
工業(yè)機(jī)器人的控制系統(tǒng)和自動(dòng)化產(chǎn)品主要涉及伺服電機(jī)、減速機(jī)、控制器和傳感器等。伺服系統(tǒng)作為工業(yè)自動(dòng)化的重要組成部分,其主要用來精確跟隨或復(fù)現(xiàn)某個(gè)過程的反饋控制系統(tǒng)。
-

-
2019-02-19 無刷電機(jī)發(fā)明人李紅濤---無刷電機(jī)之父
無刷電機(jī)發(fā)明人李紅濤---無刷電機(jī)之父李紅濤,1966年8月12日生,男,湖北省黃陂縣人,出生于一個(gè)普通的知識(shí)分子家庭。在李紅濤14歲時(shí)就被評(píng)為了“優(yōu)秀青年”,獲得全國中學(xué)生數(shù)學(xué)競賽的第二名,可以說是一個(gè)典型的理工男。
-

-
2019-01-26 步進(jìn)驅(qū)動(dòng)器接線圖
步進(jìn)電機(jī)驅(qū)動(dòng)器接線PU+和DR+直接接的開關(guān)電源的24V,然后PU-和DR-接入PLC。步進(jìn)驅(qū)動(dòng)器接線圖,正常就是這么接的,但是PLC輸出和PU-,DR-連接時(shí)需要分別串2K左右的電阻。不能直接接,否則容易燒壞驅(qū)動(dòng)器。因?yàn)椴竭M(jìn)驅(qū)動(dòng)器控制端電壓是5V的,你接24V時(shí)需要串電阻降壓。
-

-
2019-01-25 漢德保怎么樣,HDB漢德保電機(jī)經(jīng)營理念
公司經(jīng)營歸根到底是商業(yè)競爭行為,優(yōu)勝劣汰是其自然法則,面對(duì)強(qiáng)大的競爭對(duì)手,我們不敢有絲毫的懈怠,我們公司必須保持很強(qiáng)的學(xué)習(xí)和改善能力,這種能力的基礎(chǔ)是每一個(gè)員工每一天都在改進(jìn)自己的工作;同時(shí)我們也尊重競爭對(duì)手,正是這些優(yōu)秀企業(yè)提高了整個(gè)行業(yè)的水平,也促進(jìn)了我們實(shí)力的提升。
-

-
2019-01-24 步進(jìn)電機(jī)接線方法,步進(jìn)電機(jī)接線圖
很多小伙伴剛接觸步進(jìn)電機(jī),步進(jìn)電機(jī)驅(qū)動(dòng)器,很有可能對(duì)于步進(jìn)電機(jī)接線方法和步進(jìn)電機(jī)接線圖弄不明白,所以可能無從下手。下面這張豆腐塊文章讓您快速掌握步進(jìn)電機(jī)的接線方法,很快看懂步進(jìn)接線圖。
-

-
2019-01-23 無刷電機(jī)是哪國發(fā)明的,無刷電機(jī)發(fā)明人是誰?
除了古代四大發(fā)明是中國發(fā)明的,無刷電機(jī)也是中國發(fā)明的。無刷電機(jī)發(fā)明人是誰?無刷電機(jī)發(fā)明人是李紅濤,或者說無刷電機(jī)發(fā)明人楊紅俊。據(jù)說,李紅濤在申請(qǐng)專利時(shí),用了楊紅俊這個(gè)名。
-

-
2019-01-22 直線電機(jī)廠家哪家好
漢德保電機(jī)是一家專業(yè)研發(fā)生產(chǎn)直線電機(jī),步進(jìn)電機(jī),無刷電機(jī)的高新技術(shù)企業(yè)。漢德保生產(chǎn)的各種電機(jī)產(chǎn)品得到眾多客戶的認(rèn)可,復(fù)購率95%,暢銷全球180多個(gè)國家地區(qū)。
-
-
2019-01-21 二相四線步進(jìn)電機(jī)怎么接線
二相四線步進(jìn)電機(jī)怎么接線,如果你分不清楚電機(jī)的A A' B B',可以向生產(chǎn)廠家要電機(jī)的接線圖。也可以自己判斷,把其中任意兩根線短接時(shí),電機(jī)很難轉(zhuǎn)動(dòng),這兩根線就是一相,你可以把它們看作A A',剩下兩個(gè)看作B B',如果方向和你要求的相反,把其中任意一相的兩根線交換位置。
-
-
2019-01-21 混合步進(jìn)電機(jī)的參數(shù)術(shù)語
靜力矩(HOLDING TORQUE): 是指步進(jìn)電機(jī)通以額定電流但沒有轉(zhuǎn)動(dòng)時(shí),定子鎖住轉(zhuǎn)子的力矩。它是步進(jìn)電機(jī)最重要的參數(shù)之一,通常步進(jìn)電機(jī)在低速時(shí)的轉(zhuǎn)矩接近靜力矩。定位力矩(DETENT TORQUE): 是指步進(jìn)電機(jī)沒有通電的情況下,定子鎖住轉(zhuǎn)子的力矩。
-
-
2019-01-19 漢德保步進(jìn)驅(qū)動(dòng)器選型原則
一、輸入電壓的選擇。輸入電壓是判斷驅(qū)動(dòng)器升速能力的標(biāo)志,所選驅(qū)動(dòng)器的允許輸入電壓應(yīng)大于電機(jī)的測試電壓(推薦電壓)。常規(guī)的供電電壓有12VDC、24VDC、36VDC、48VDC、80VDC、110VDC、110VAC、220VAC等。二、輸出電流的選擇。輸出電流是判斷驅(qū)動(dòng)器驅(qū)動(dòng)能力大小的重要標(biāo)志,所選驅(qū)動(dòng)器的輸出有效電流應(yīng)不小于電機(jī)的額定電流。通常驅(qū)動(dòng)器有0.3A 、0.8A 、1.0A、 2A 、3A、 4A 、5A 、6A 6.8A 、8.5A等規(guī)格。三、細(xì)分?jǐn)?shù)的選擇。細(xì)分能增加電機(jī)運(yùn)行的平穩(wěn)性,在要求在低速平穩(wěn)運(yùn)行的應(yīng)用中,建議選具有更高細(xì)分的驅(qū)動(dòng)器。
-
-
2019-01-18 步進(jìn)電機(jī)細(xì)分參數(shù)如何設(shè)置
1、步進(jìn)電機(jī)控制,只能整步整步的轉(zhuǎn)動(dòng),如果細(xì)分就失去步進(jìn)的意義;2、但是工件的位移,可以通過傳動(dòng)比細(xì)分,通過傳動(dòng)比提高電機(jī)的轉(zhuǎn)速,減低工件的位移速度;3、例如4極、3相步進(jìn)電機(jī),每轉(zhuǎn)一周有12步,轉(zhuǎn)100周共1200步,工件走1200mm,那么每步工件移動(dòng)1mm;4、例如4極、3相步進(jìn)電機(jī),每轉(zhuǎn)一周有12步,轉(zhuǎn)100周共1200步,工件走120mm,那么每步工件移動(dòng)0.1mm;5、例如4極、3相步進(jìn)電機(jī),每轉(zhuǎn)一周有12步,轉(zhuǎn)100周共1200步,工件走12mm,那么每步工件移動(dòng)0.01mm。
-
-
2019-01-17 1.8度步進(jìn)電機(jī)和步進(jìn)電機(jī)0.9度步進(jìn)電機(jī)?
即指1.8度步進(jìn)電機(jī)的每步偏差+/-5.4arc,而0.9度步進(jìn)電機(jī)每分鐘步偏差+/-2.7arc。這是因?yàn)殡姍C(jī)步距角精度是由力矩強(qiáng)度決定的,而力矩強(qiáng)度是由最大保持轉(zhuǎn)矩和轉(zhuǎn)子的齒數(shù)決定。
-
-
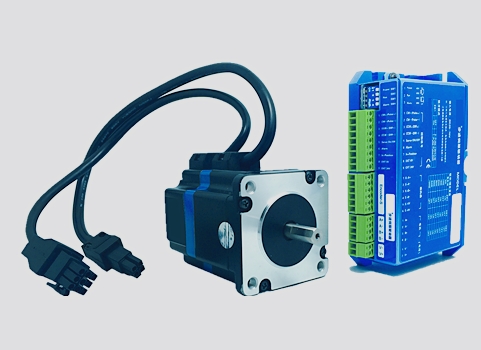
2019-01-16 力矩1.2N.m,轉(zhuǎn)動(dòng)慣量240應(yīng)選哪個(gè)型號(hào)的步進(jìn)電機(jī)?
轉(zhuǎn)矩1.2N.m轉(zhuǎn)動(dòng)慣量240應(yīng)該選擇HDB經(jīng)濟(jì)型60步進(jìn)電機(jī)2401HS20V8,轉(zhuǎn)矩1.2N.m的步進(jìn)電機(jī),出軸的長度是可以根據(jù)您的具體需求來定制;漢德保轉(zhuǎn)矩1.2N.m的步進(jìn)電機(jī)2401HS20V8的出線長度可根據(jù)客戶要求定制;額定電流3.0A,轉(zhuǎn)矩1.2N.m的步進(jìn)電機(jī)2401HS20V8推薦漢德保驅(qū)動(dòng)器型號(hào)ASD545R,或者ASD880R。
-
-
2019-01-15 步進(jìn)電機(jī)只振動(dòng)不轉(zhuǎn)是什么原因
步進(jìn)電機(jī)只振動(dòng)不轉(zhuǎn)是什么原因?步進(jìn)電機(jī)只振動(dòng)不轉(zhuǎn)主要有兩個(gè)方面的原因。步進(jìn)電機(jī)只振動(dòng)不轉(zhuǎn)的原因一是接線錯(cuò)誤, 電機(jī)往前轉(zhuǎn)一點(diǎn), 往后轉(zhuǎn)一點(diǎn), 前前后后就振動(dòng)起來了。步進(jìn)電機(jī)只振動(dòng)不轉(zhuǎn)是因?yàn)槌绦蝈e(cuò)誤, 程序脈沖給定太快了, 電機(jī)都反應(yīng)不過來, 只能跟著振動(dòng)。

