
-
-
2019-09-30 步進電機驅(qū)動器電壓是多少?
首先來確定步進電機驅(qū)動器電壓,混合式步進電機驅(qū)動器的供電電源電壓一般是一個較寬的范圍。如果電機工作轉(zhuǎn)速較高或響應(yīng)要求較快,那么電壓取值也高,但注意電源電壓的紋波不能超過驅(qū)動器的最大輸入電壓,否則可能損壞驅(qū)動器。
-
-
2019-09-27 步進電機的參數(shù)有哪些?
步進電機的參數(shù)有哪些?步進電機的參數(shù)一,相數(shù),相數(shù)常用m表示;步進電機的參數(shù)二,拍數(shù),常用n表示;步進電機的參數(shù)三,步距角;步進電機的參數(shù)四,定位轉(zhuǎn)矩;步進電機的參數(shù)五,靜轉(zhuǎn)矩。
-

-
2019-09-24 什么是混合式步進電機?
常常聽說的混合式步進電機,但是什么是步進電機呢?混合式步進電機就是混合式步進是指混合了永磁式和反應(yīng)式的優(yōu)點。混合式步進電機又分為兩相、三相和五相。
-
-
2019-09-19 繞線機步進電機用哪種好?
繞線機步進電機,我們已經(jīng)做得很成熟了,估計有15家生產(chǎn)繞線機廠家選擇了我們的步進電機和混合伺服電機。繞線機步進電機選型,請來電咨詢或者咨詢在線客服。
-
-
2019-09-18 步進電機步距角精度是什么?
步距角是步進電機一個脈沖轉(zhuǎn)動的角度,比如步距角是1.8°,而要轉(zhuǎn)動1.2°就轉(zhuǎn)不到,給出一個脈沖就轉(zhuǎn)1.8°了,就差了6°,精度就是不夠。
-

-
2019-09-15 總線型步進驅(qū)動器的優(yōu)勢
一臺步進電機要運轉(zhuǎn),必須由驅(qū)動器來驅(qū)動。以前常見的驅(qū)動器是脈沖型驅(qū)動器,但是現(xiàn)在隨著發(fā)展出現(xiàn)了總線型步進驅(qū)動器。總線型步進驅(qū)動器因其具有獨特的優(yōu)勢而被市場接受。
-
-
2019-09-10 硬齒面減速機的特點和應(yīng)用
硬齒面減速機應(yīng)用范圍:1.硬齒面減速機高速軸轉(zhuǎn)速不大于1500轉(zhuǎn)/分;2.硬齒面減速機齒輪傳動圓周速度不大于20米/秒;3.硬齒面減速機工作環(huán)境溫度為-40℃-45℃。
-
-
2019-09-04 步進電機是開環(huán),伺服電機是閉環(huán),對嗎?
步進電機是開環(huán),伺服電機是閉環(huán),對嗎?伺服主要靠脈沖來定位,基本上可以這樣理解,伺服電機接收到1個脈沖,就會旋轉(zhuǎn)1個脈沖對應(yīng)的角度,從而實現(xiàn)位移。
-

-
2019-08-27 LED水晶大魔球步進電機,舞臺燈光步進電機哪家好?
漢德保電機,在舞臺設(shè)備上的應(yīng)用以及十分普及,國內(nèi)外幾十家舞臺設(shè)備的公司都選擇了用漢德保LED水晶大魔球步進電機,漢德保舞臺燈光步進電機。
-
-
2019-08-20 步進電機選型相關(guān)知識
了解步進電機選型相關(guān)知識,應(yīng)從步距角,輸出扭矩,最高啟動頻率等等來分析。首先就是步距角和靜態(tài)步距誤差。 步進電機每步的轉(zhuǎn)角稱為步距角;步距誤差:在一周內(nèi)各步誤差最大值。
-

-
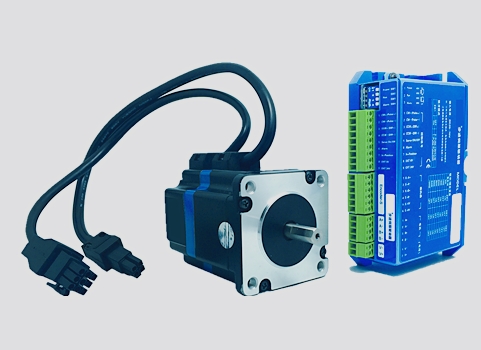
2019-08-15 DM542步進電機驅(qū)動器介紹
DM-542是漢德保(HamDerBurg)公司研發(fā)生產(chǎn)的一款智能型數(shù)字式步進驅(qū)動器。DM542驅(qū)動器搭載步進電機控制專用DSP芯片,基于空間矢量PID電流控制技術(shù),內(nèi)部集成參數(shù)自整功能,具有優(yōu)越的性能表現(xiàn)。
-
-
2019-08-12 步進電機的性能,步進電機好不好是看哪些呢?
步進電機的性能①步距角和靜態(tài)步距誤差。 步進電機每步的轉(zhuǎn)角稱為步距角α。α=360/(mZQ),m:定子相數(shù);Z:轉(zhuǎn)子齒數(shù);Q:拍數(shù)相數(shù)比。 步距誤差:在一周內(nèi)各步誤差最大值。步進電機好不好,需參考步距角和靜態(tài)步距誤差。
-
-
2019-08-10 同步電機與步進電機的區(qū)別有哪些?
步電機與步進電機的區(qū)別1、同步電機:由于電樞繞組與主磁場之間的相對切割運動,電樞繞組中將會感應(yīng)出大小和方向按周期性變化的三相對稱交變電勢。通過引出線,即可提供交流電源。
-
-
2019-08-06 步進電機的加速時間是怎么樣的?
問:請問一下有一臺步進電機,步進電機的最高轉(zhuǎn)速為每分鐘1000轉(zhuǎn),需要做來回運動,移動距離均在0.5—1mm左右,它的單次加速時間和減速時間大約為多少?
-
-
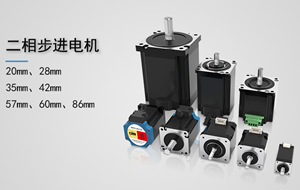
2019-07-30 繪圖儀步進電機是幾相幾線的?
繪圖儀步進電機是幾相幾線的?這個需要看繪圖儀尺寸,繪圖儀步進電機按定子上繞組來分,共有二相、三相和五相等系列。最受市場歡迎的是兩相混合式步進電機,約占97%以上的市場份額,其原因是性價比高,配上細分驅(qū)動器后效果良好。

